
 United Kingdom
United Kingdom
 France
France
 Germany
Germany
 Netherlands
Netherlands
 Sweden
Sweden
 USA
USA
 Italy
Italy
 Spain
Spain
More From Contributor










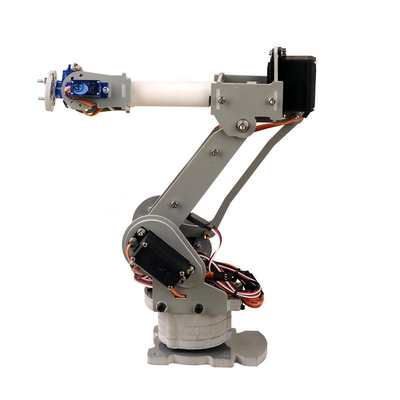
DIY 6DOF Robot Arm 4 Axis Rotating Mechanical Robotic Arm For Arduino
The robot arm model is the ABB industrial robot structure proportion model. It can actually control the motion of the robot arm model according to the numerical control idea. It is suitable for teaching experiments, focusing on action demonstration, and has no actual load-bearing ability.Feature:The material of the robot arm:The plate of the manipulator model is pvc engineering plastics and is made by CNC machining. The mechanical bottleneck of the robotic arm is the torque of the servo, the plate of the manipulator has not been deformed and the servo has no power. Another advantage of the pvc engineering plastic is that the ductility of the material is very suitable for the inlaid bearing, and the bearing connection is used to increase the accuracy of the structure. All joints of the
arm have high quality bearing connections.Six degrees of freedom of the robot arm:a: waist 0-180 degreesb: The big and small arms interact with each other, and the rotation angle range is variable.c: The big and small arms interact with each other. The rotation angle range is variable.d: arm rotation 0-180 degreese: wrist 0-180 degreesf: claw 0-180 degrees(0~180 degrees is the theoretical value, the actual angle is between 5~175 degrees)The accuracy of the robot arm:Because the power of the robotic arm model is the steering gear used in the model industry, the internal gear used in the steering gear is an ordinary reduction gear, and the gear clearance is expressed in the wrist with a free strok
arm have high quality bearing connections.Six degrees of freedom of the robot arm:a: waist 0-180 degreesb: The big and small arms interact with each other, and the rotation angle range is variable.c: The big and small arms interact with each other. The rotation angle range is variable.d: arm rotation 0-180 degreese: wrist 0-180 degreesf: claw 0-180 degrees(0~180 degrees is the theoretical value, the actual angle is between 5~175 degrees)The accuracy of the robot arm:Because the power of the robotic arm model is the steering gear used in the model industry, the internal gear used in the steering gear is an ordinary reduction gear, and the gear clearance is expressed in the wrist with a free strok


Product Description
Reviews/Comments
Add New
Vouchers
No voucher codes found.
Do you know a voucher code for this product or supplier? Add it to Insights for others to use.
Do you know a voucher code for this product or supplier? Add it to Insights for others to use.
 Denmark
Denmark